Risk profile
STRUCTURAL INTEGRITY METRICS // INDIA BRIDGE DATABASE
FAILURES RECORDED
(1980-2020)
BRIDGES COLLAPSED
(LAST 5 YEARS)
TOTAL NH BRIDGES
(INDIA DATABASE)
INSPECTION CYCLE
(MANUAL AVG)
CONSEQUENCES
ROOT CAUSES
INADEQUATE INSPECTION
Structural damage goes undetected due to inconsistent monitoring cycles.
ENVIRONMENTAL FACTORS
Monsoon flooding, erosion, and corrosion weaken foundations.
OVERLOADING
Bridges handle loads beyond rated capacity, causing micro-fractures.
AGING STRUCTURES
Legacy infrastructure built before modern safety standards.
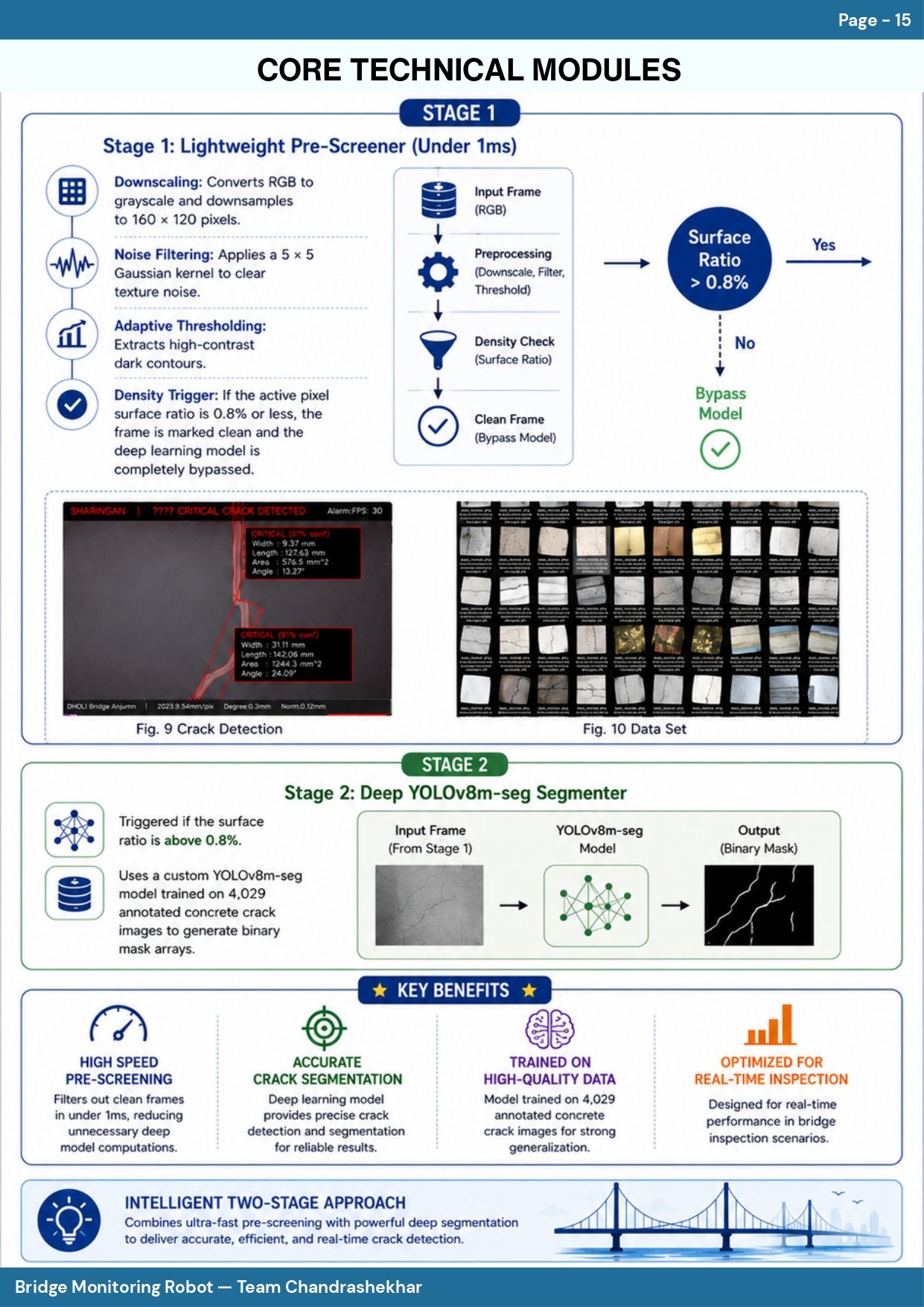
How BMS operates
SIX-PHASE AUTONOMOUS INSPECTION SEQUENCE
Deploy
Placed at bridge entry point. Operator sets pathway coordinates. Systems run auto-diagnostics check prior to traversal engagement.
Adhere
2200KV BLDC motor spins propeller to generate downward reverse thrust. Firm adhesion to concrete, steel, or overhead surfaces.
Traverse
Four N20 geared DC motors drive high-grip silicon rubber tyres. Traverses along inspection path maintaining active reverse thrust.
Capture
High-res onboard camera captures continuous video frames. Real-time stream is routed straight to the local ESP32 microcontrollers.
Analyse
Sharingan AI downsamples frames, screens anomalies, and segments cracks with YOLOv8m-seg, classifying severity and mm width.
Alert
Danger-class alerts wirelessly trigger operator module. Structured reports compiled and saved to local JSON database.
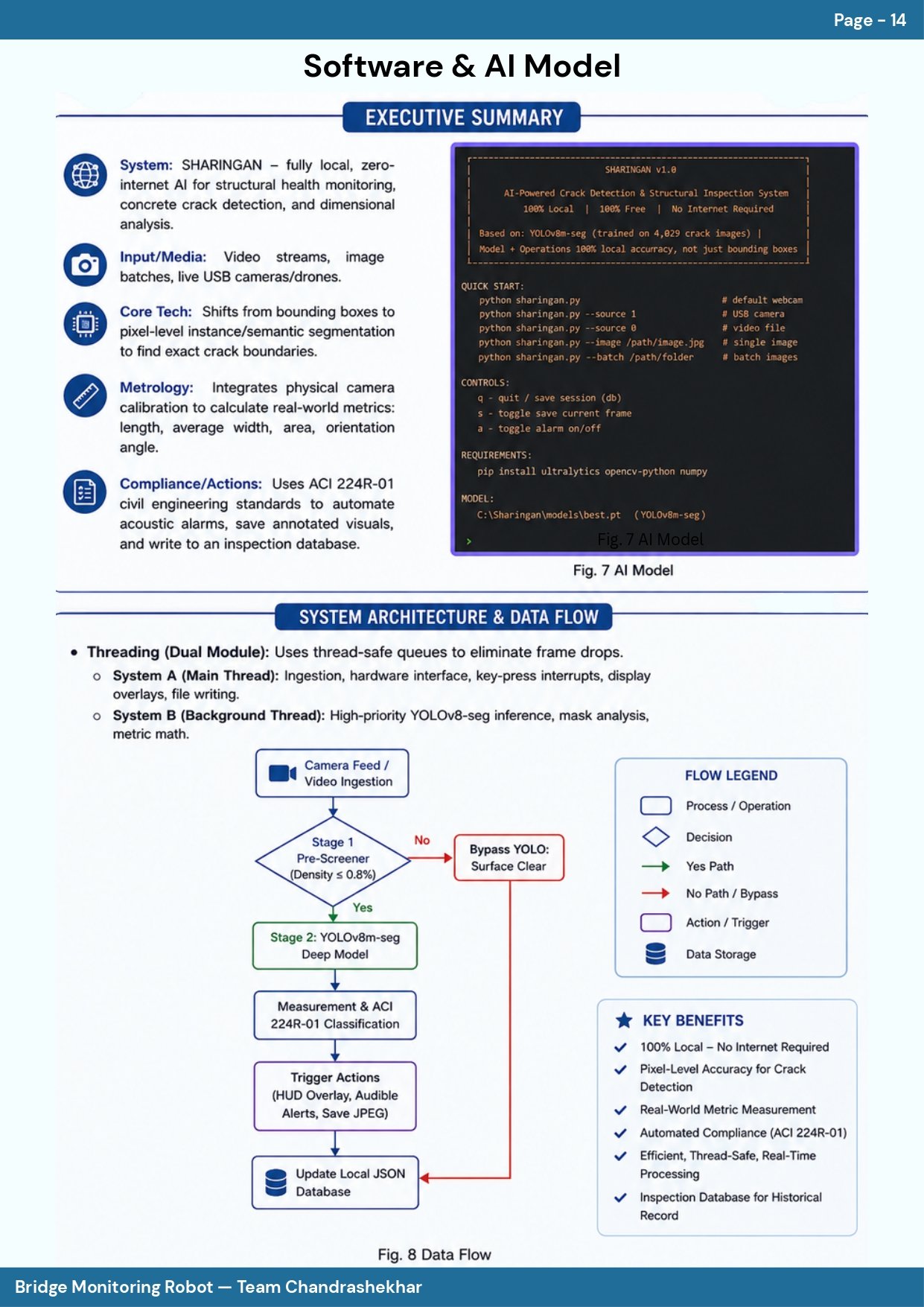
Sharingan intelligence
LOCAL CONCRETE ANOMALY DETECTION, METROLOGY & THREADING
Sharingan operates locally on the edge camera interface, executing a dual-thread pipeline. It completely bypasses high-compute modules when no damage is scanned, maintaining real-time processing on embedded hardware.
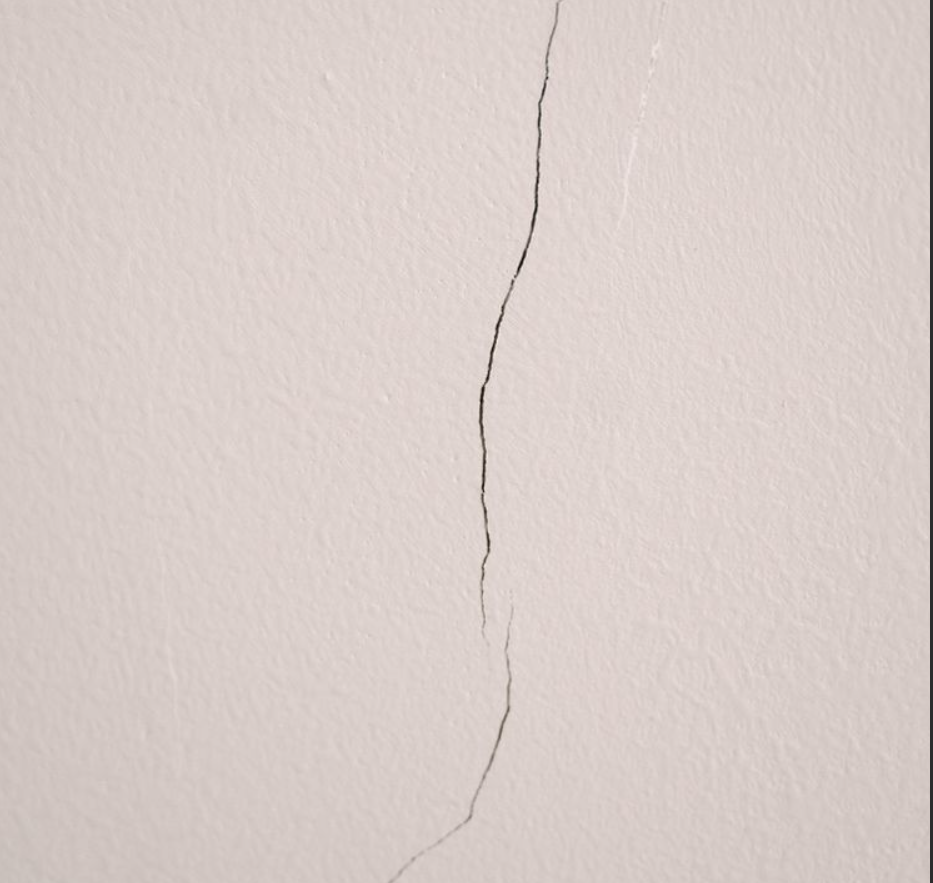
Unprocessed raw surface
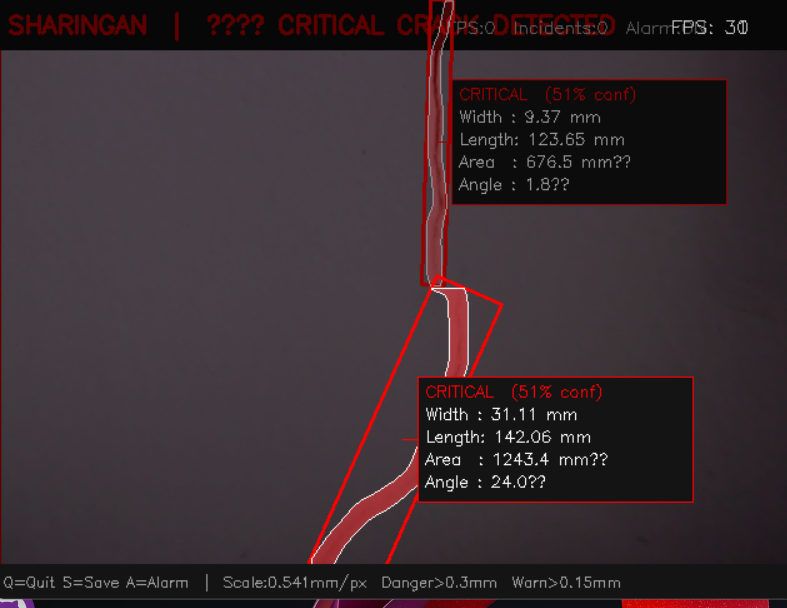
Sharingan real-time HUD overlay
The prototype journey
HARDWARE ITERATIONS & FIELD FAILURES
Version 1 — Electromagnetic adhesion
Initially built to stick onto steel bridge reinforcement beams using powerful electromagnets. The system suffered from massive current draw, draining the main battery in under 4 minutes. Additionally, the motor mounts were structurally inadequate (carved out by hand), resulting in vibration stress. During high-load testing, the L298N motor driver exploded under stress, forcing a complete mechanical redesign.
Version 2 — Reverse thrust mechanism
Moved to an aerodynamic adhesion design. A central 2200KV BLDC motor spins a propeller to generate continuous downward pressure. The design is material-agnostic (works on concrete and steel). We initially used a 2-blade propeller, which lacked sufficient air displacement to hold the robot on steep angles. Upgraded to a high-pitch 3-blade propeller, generating the exact thrust needed to climb vertical walls.
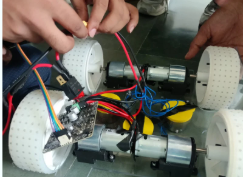 Robo v1
Robo v1
 FIG 2. ELECTROMAGNET ASSEMBLY
FIG 2. ELECTROMAGNET ASSEMBLY
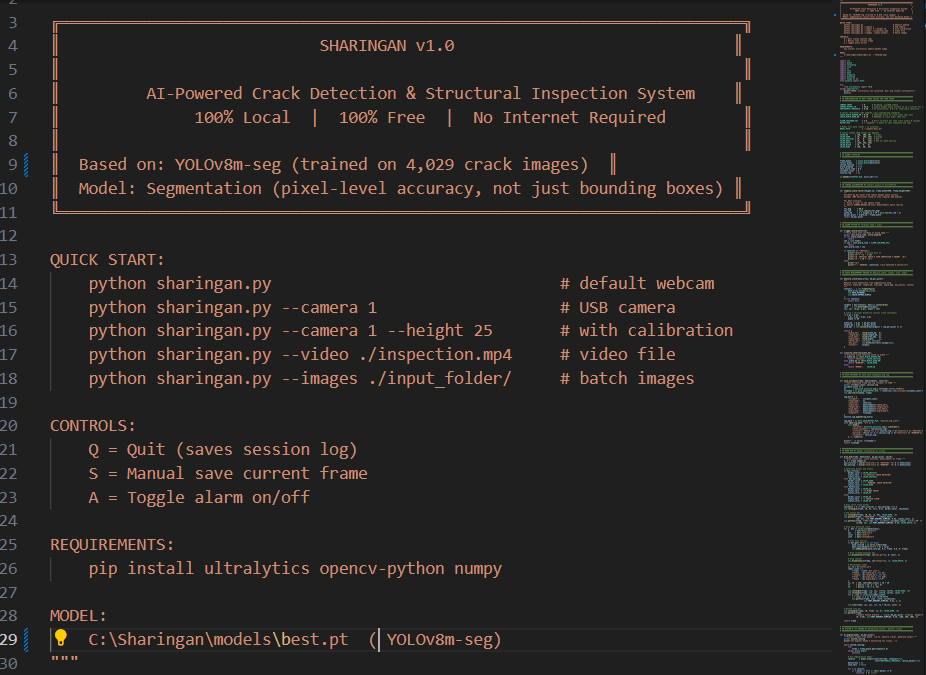 FIG 3. AI DETECTION OUTPUT
FIG 3. AI DETECTION OUTPUT
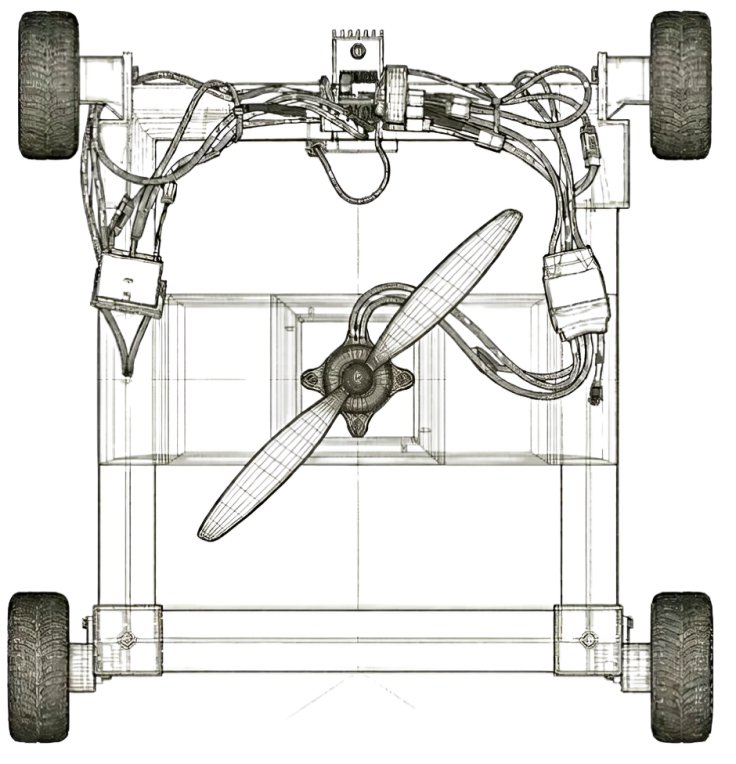
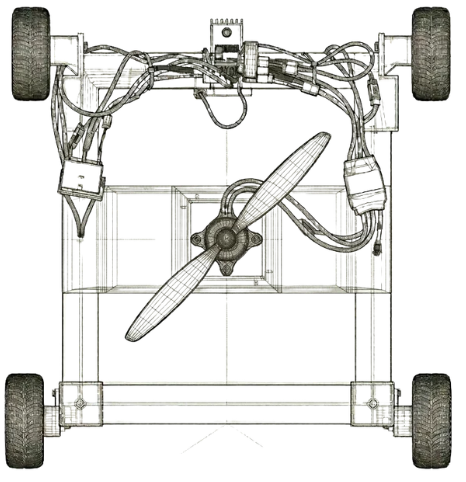 FIG 4. CHASSIS ISOMETRIC
FIG 4. CHASSIS ISOMETRIC
The hardware specifications
COMPONENTS MANIFEST // KINETIC ENGINEERING DATA
Locomotion system
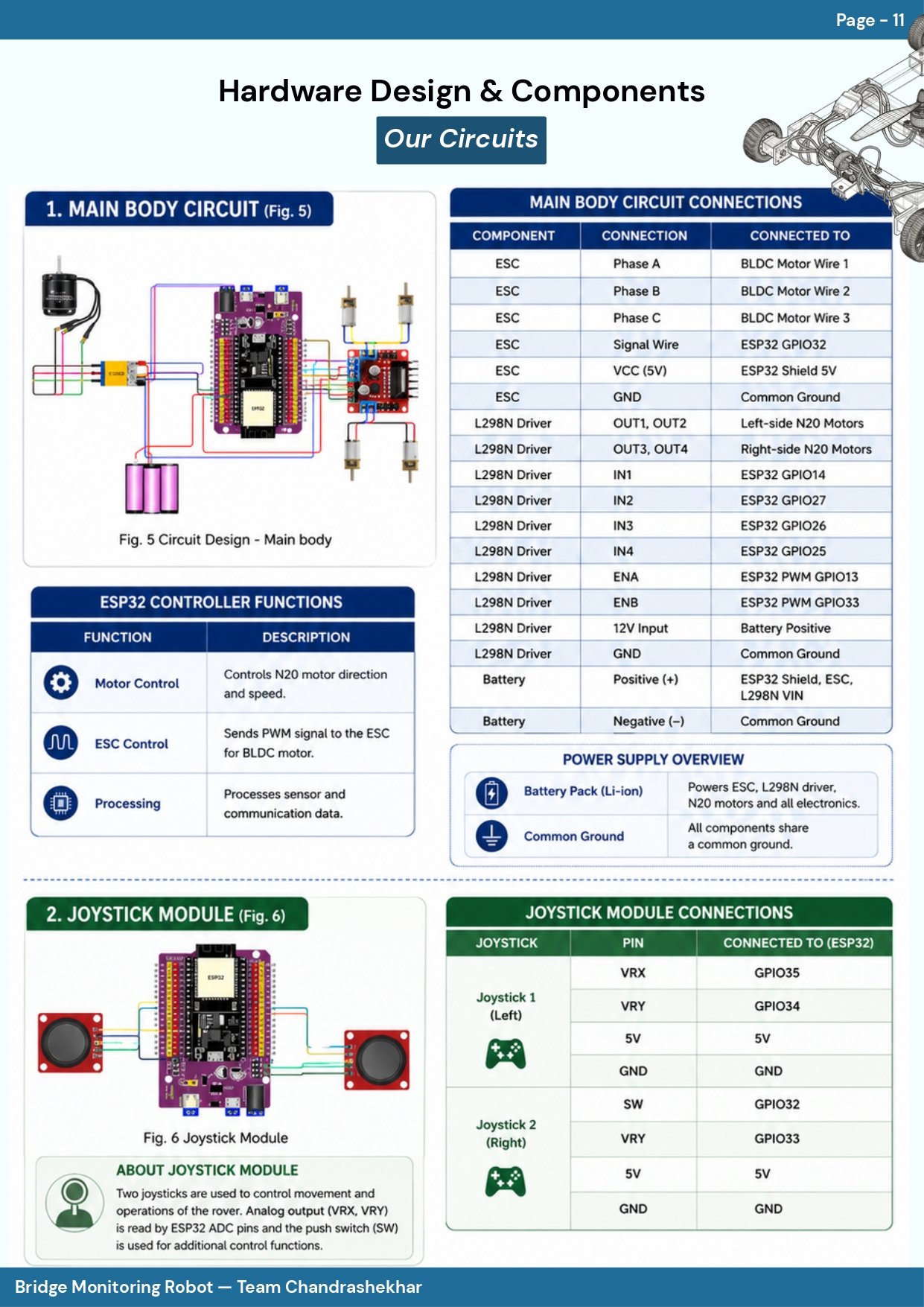
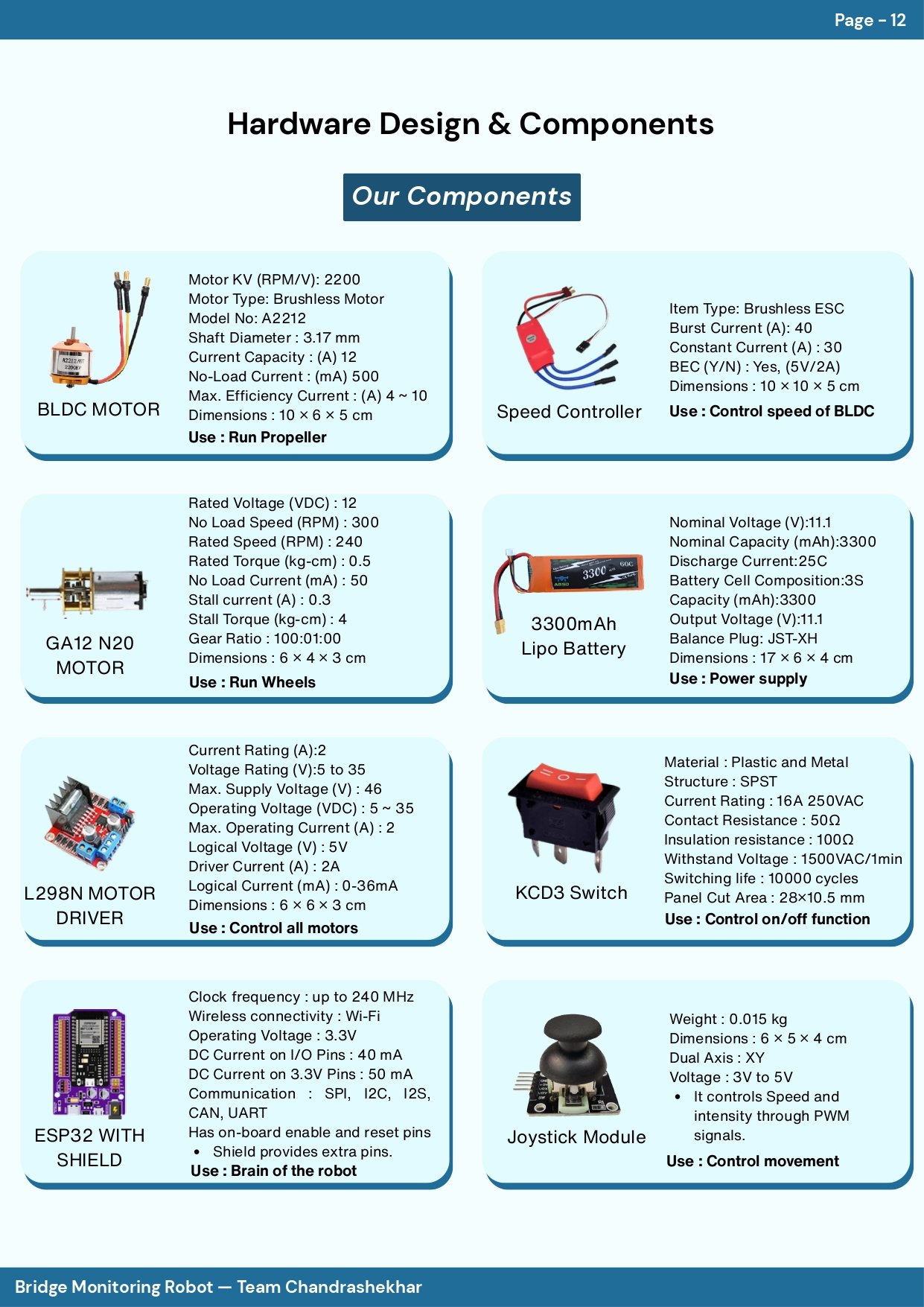
4× N20 High-Torque DC Motors (12V) driving silicon rubber tyres. Regulated by a dual-channel L298N H-Bridge motor driver module for directional pathing.
Adhesion mechanism
Aerodynamic reverse thrust. A2212 2200KV BLDC motor driven by a 30A ESC generates a continuous perpendicular downward force, holding the chassis onto concrete/steel surfaces.
Dual controllers
Dual ESP32 Dev Boards. Unit-01 (onboard) controls BLDC throttle, motors, camera stream. Unit-02 (operator) manages joystick overrides and handles diagnostic GPRS logs.
Sharingan vision AI
Edge processing. Integrates a lightweight pre-screener (<1ms grayscale downsampling + adaptive threshold) with YOLOv8m-seg to perform pixel-level concrete crack detection.
| # | COMPONENT | QTY | TECHNICAL SPECIFICATIONS | COST (₹) |
|---|---|---|---|---|
| 1 | Motor Driver L298N | 1 | Dual H-bridge, 10A motor driver module | 150 |
| 2 | N20 DC Motor | 4 | 12V high-torque, mini metal gear motors | 400 |
| 3 | ESP32 Dev Board | 2 | Dual-unit control module (operator + robot) | 600 |
| 4 | Joystick Module | 2 | Dual-axis analog override modules | 100 |
| 5 | BLDC Motor 2200KV | 1 | A2212 motor for reverse thrust adhesion | 1,500 |
| 6 | Simonk ESC 30A | 1 | Brushless speed controller with 5V/2A BEC | 800 |
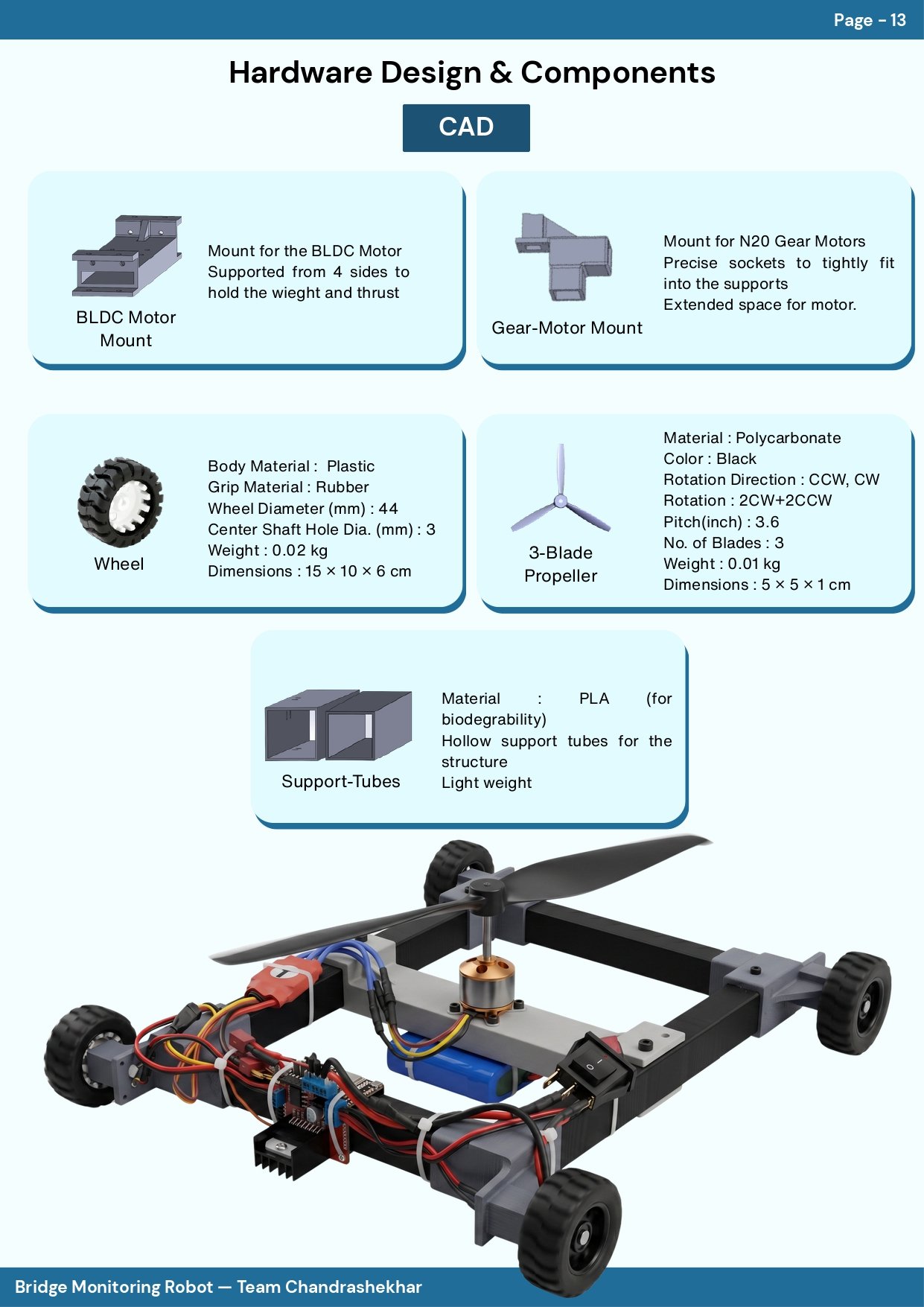
| 7 | Chassis (Custom) | 1 | 3D printed PLA + lightweight aluminium frame | 2,500 |
| 8 | Silicon Tyres | 4 | High-traction rubber wheels (44mm diameter) | 600 |
| 9 | Toggle Switch | 2 | KCD3 SPST switches (BLDC + main line) | 50 |
| 10 | Camera Module | 1 | 1080p high-resolution vision feed sensor | 1,800 |
| 11 | LiPo Battery 3S | 1 | 11.1V 3300mAh high-discharge pack | 2,500 |
| 12 | Propeller | 1 | 5-inch 3-blade propeller matching BLDC motor | 300 |
| 13 | PCB + Wiring | — | Custom prototyping boards, jumpers, shrink tubes | 600 |
| 14 | PLA Filament | — | Biodegradable spool for structural supports | 900 |
| 15 | Misc Hardware | — | Screws, standoffs, backing foam, zip ties | 700 |
| Total build cost | ₹15,000 | |||
Current sensing logic
Feeds raw frames at 60fps to Sharingan AI pre-screener and YOLOv8m-seg model.
Roadmap v2.0 sensors
For geolocation tagging of concrete crack anomalies in national database.
Measures real-time orientation, incline, and bridge deck vibrations.
Detects subsurface moisture patches and structural heat anomalies.
Generates 3D depth-map mesh models of bridge concrete facades.
Live diagnostics
REAL-TIME STRUCTURAL HEALTH TELEMETRY STREAM
Coming Soon
Telemetry interface and real-time YOLOv8m-seg concrete crack mapping are undergoing integration. Stream scheduled to commence shortly.
Mission impact
UN SUSTAINABLE DEVELOPMENT GOALS & REAL WORLD USE CASES
Human Safety
By removing human inspectors from dangerous elevated positions, the Bridge Monitoring Robot directly reduces occupational injury and fatality risk in the infrastructure inspection sector.
In India, thousands of inspection personnel operate in hazardous conditions annually — automation of this task represents a meaningful step toward safer labor practices and a futuristic industrial ecosystem.
Scalability & National Impact
Deploying even a small fleet of monitoring robots across high-risk structures would dramatically improve national infrastructure safety. At scale, the per-inspection cost drops significantly.
Economic Benefits
-
arrow_forward
01. Preventive Maintenance
Catching damage early costs a fraction of post-collapse reconstruction.
-
arrow_forward
02. Reduced Labor Costs
One robot replaces a team of inspectors for each inspection cycle.
-
arrow_forward
03. Liability Reduction
Documented inspection records reduce liability exposure for authorities.
-
arrow_forward
04. Transport Continuity
Fewer unexpected closures keep supply chains and transport running.
At a production cost of only ₹15,000 per unit, the Bridge Monitoring System provides a path to deploying fleets of inspection robots across national and state highway networks, increasing scanning frequency, saving human lives, and reducing inspection budgets by over 70%.
Industry, Innovation & Infrastructure
BMS deploys local AI-driven edge technology to automate structural health monitoring, updating century-old manual practices with high-precision computer vision.
Sustainable Cities & Communities
Continuous scanning of aging concrete decks protects metropolitan corridors from collapse, maintaining uninterrupted supply chain and transit operations.
Good Health & Well-Being
By removing inspection personnel from hazardous scaffolding setups over water or high traffic, BMS directly mitigates high-altitude occupational risks.
Partnerships for the Goals
Released openly under permissive MIT licensing, BMS allows academic and civic bodies to collaborate, adapt, and build upon the traversal framework freely.
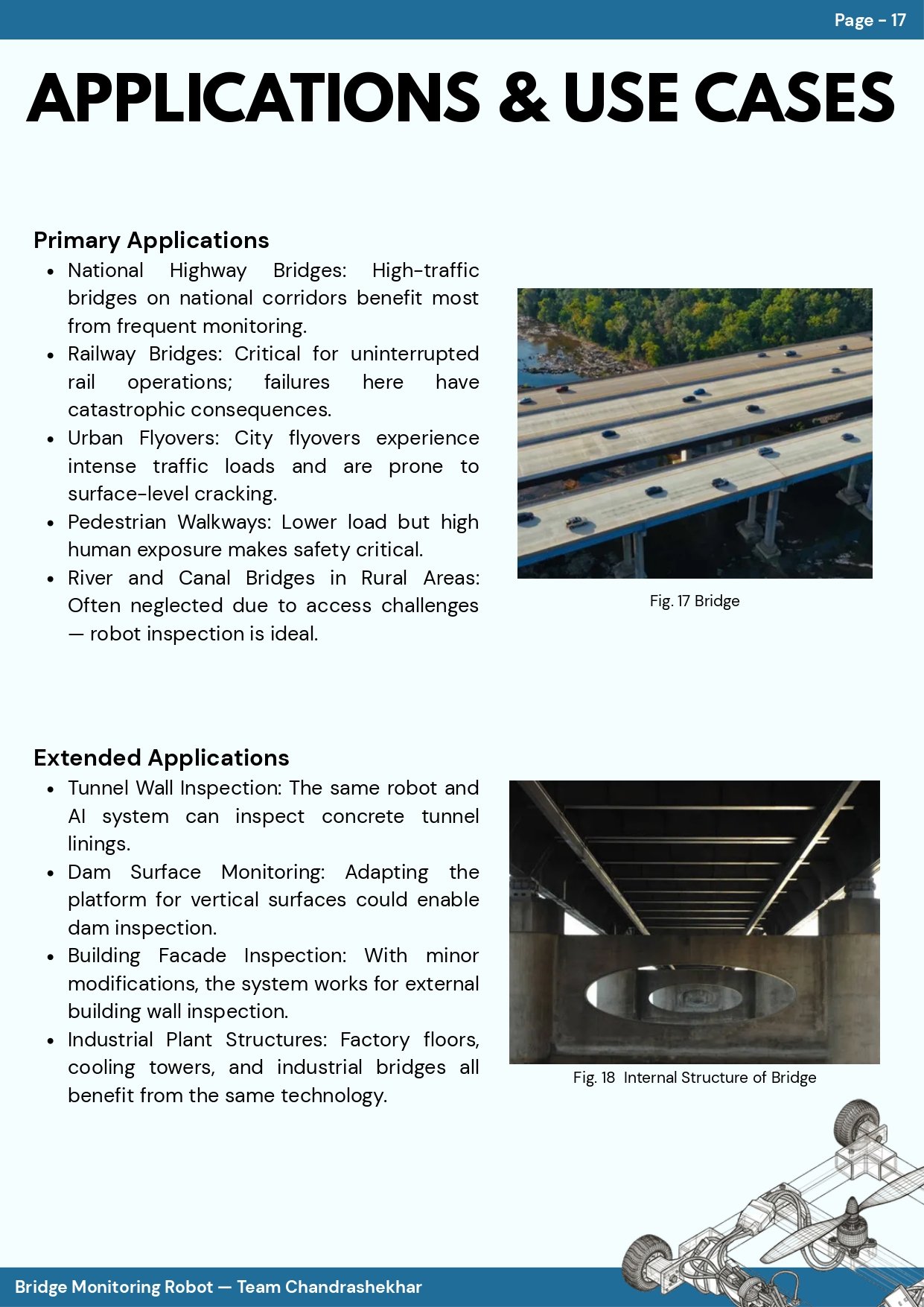
Primary use cases
Extended applications
Challenges & roadmap
LIMITATIONS AND PLANNED INFRASTRUCTURE TARGETS
Team Chandra Shekhar
CM SHRI SCHOOL // ROBOTICS BOOTCAMP TECH 4 FUTURE 2026

Ritik Raj
TEAM LEADERProject direction, system integration & competition strategy.

B. Kaushik
HARDWARE LEADCircuit design, component wiring, motor driver integration.
Ansh
CAD & DOCS3D models, chassis design, technical reports & diagrams.

Mayank
HARDWAREMechanical assembly, chassis fabrication, component testing.

Rajesh
SW · RESEARCHFirmware coding, AI integration, sensor testing & research.

Om Mahadeshwar
PRIMARY MENTOR"The Bridge Monitoring System represents the kind of engineering thinking we hope to inspire — real problems, real solutions, real cost constraints."
Devendra Pawar
HELPING MENTOR (ELECTRICALS)"Electrical systems are the nervous system of any robot — master the current, and you master the machine."
Engineering journal
FIELD NOTES & BUILD LOG // TEAM CHANDRASHEKHAR




Resources & downloads
OPEN SOURCE CAD, FIRMWARE & AI MODELS
CAD files
3D assembly files — robot chassis, mounts, structural plates.
AI weights
YOLOv8m-seg trained weights. Dataset info and configs included.
Demo video
Full traversal demonstration of BMS v1.0 climbing concrete deck walls.
Team Chandrashekhar / BMS
All code repositories, CAD drawings, trained AI weights, and documentation in one single master repository.
Magnetic Docking Bay
SECURE RETRIEVAL & SHOWCASE PROTOCOL
ROBOT NOT IN PROXIMITY
Scroll to bring the robot into the vicinity of the docking bay. Once in proximity, the magnetic lock can be engaged. Clicking inside the frame or on the docked robot activates the immersive 3D Showcase.
FAQ records
SYSTEM DOCUMENTATION // FIELD OPERATIONS
BMS is an autonomous robotic platform that climbs bridge concrete facades using reverse-thrust adhesion. It streams live camera footage processed locally by a custom Sharingan AI model to segment surface cracks, measure real-world millimeter dimensions, and classify severity. Critical anomalies trigger wireless GPRS/Wi-Fi warnings to operators.
The robot uses an aerodynamic reverse thrust mechanism. An onboard 2200KV brushless motor spins a high-pitch 3-blade propeller to generate a perpendicular downward force. This holds the high-grip silicon rubber tires against the surface. It is material-agnostic, working on concrete, masonry, and steel alike.
The custom YOLOv8m-seg segmentation model achieves 80% accuracy. The Sharingan AI pipeline downsamples images to filter out surface noise and texture, generating binary mask arrays of cracks to measure actual width and length, sort them by severity, and prevent false alerts caused by shadows.
The complete Bridge Monitoring System was built during the bootcamp for exactly ₹15,000. This covers all electronics (dual ESP32, camera), actuators (BLDC motor, N20 locomotion array, ESC), chassis fabrication (3D filament + aluminum frame), and hardware, making it over 95% cheaper than commercial equivalents.
Yes. All source code, 3D CAD step assemblies, STL print files, and YOLOv8m-seg models are released under the open-source MIT License. Anyone (universities, research labs, public works departments) can copy, modify, and deploy the system freely.
Data is transmitted wirelessly using dual ESP32 units with sub-20ms latency. The robot streams telemetry and segmented crack dimensions to the operator receiver, which triggers an immediate warning screen and buzzer for critical severity detections. All telemetry logs are compiled into structured reports.
Yes, the propeller-driven reverse-thrust mechanism is material-agnostic. It works on concrete decks, masonry arches, and steel trusses, climbing vertical columns and undersides as long as the surface provides friction for the silicone rubber tires.
Ready to protect your bridges?
The Bridge Monitoring System is open source, affordable, and built for real-world scaling. Partner with us for research, licensing, or pilot field testing.
ritikra3333s@gmail.comRobotics Bootcamp Tech 4 Future 2026
Open source framework — build, deploy freely
Team Chandra Shekhar